|
I am an incoming Ph.D. student at the VILAB at EPFL this fall, where I'm advised by Prof. Amir Zamir. I work on Computer Vision, Embodied AI, and Reinforcement Learning. Before grad school, I spent two amazing years in the PRIOR team at the Allen Institute for AI (AI2). Previously I was a research assistant at the Computer Vision Lab at GIST working with Prof. Jonghyun Choi. Even earlier, I finished my undergraduate studies at the Indian Institute of Technology, Roorkee. Email / CV / Google Scholar / Semantic Scholar / Twitter / Github |

|
|
I am interested in building actionable representations that enable embodied agents to physically reason about their environments and perform tasks for and alongside humans. |
|
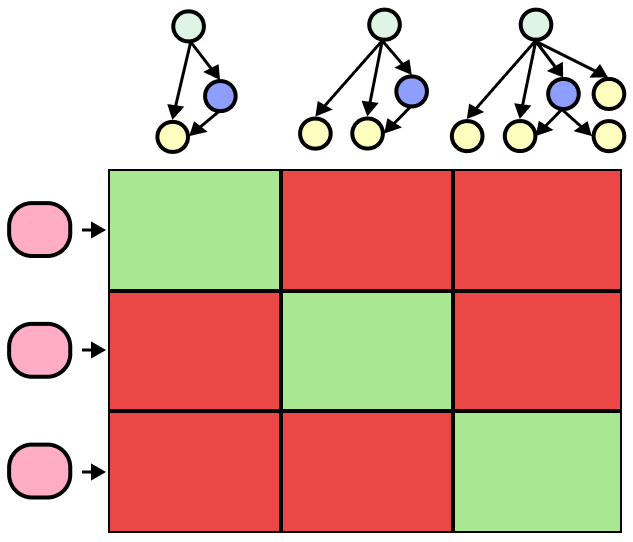
Kunal Pratap Singh, Jordi Salvador, Luca Weihs, Aniruddha Kembhavi ICCV, 2023 Paper We propose the Scene Graph Contrastive Loss, an auxiliary objective that encourages the agent's belief to align its representation with a rich graphical encoding of its environments. We show results on Object Navigation, Multi-Object Navigation and ArmPointNavigation. |
|
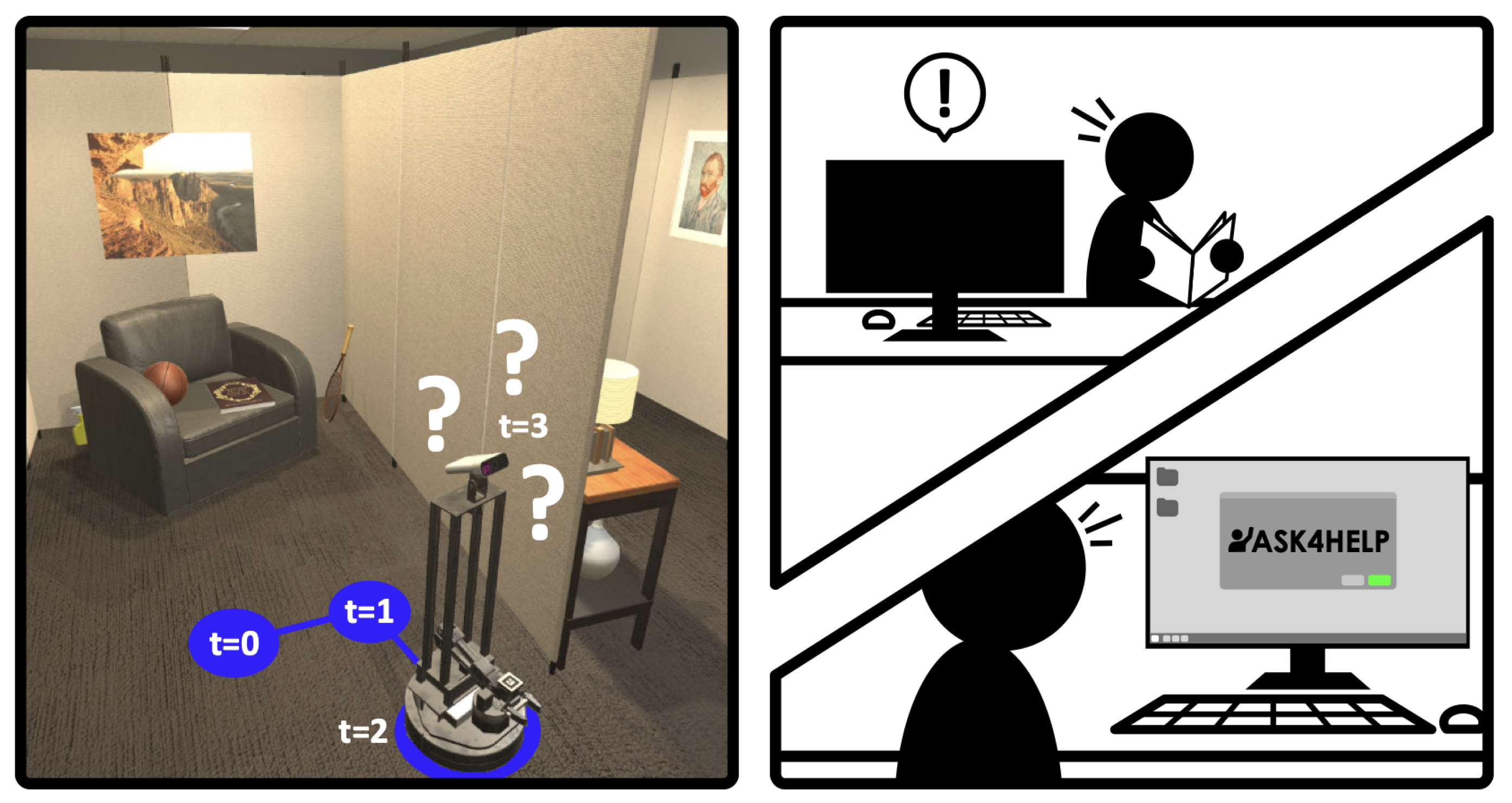
Kunal Pratap Singh, Luca Weihs, Alvaro Herrasti, Jonghyun Choi, Aniruddha Kembhavi , Roozbeh Mottaghi NeurIPS, 2022 Paper | Code We propose Ask4Help, a framework that endows embodied agents with the ability to request expert help. We applying this framework to existing off-the-shelf Embodied-AI models and improve task performance on Object Navigation and Room Rearrangement. |
|
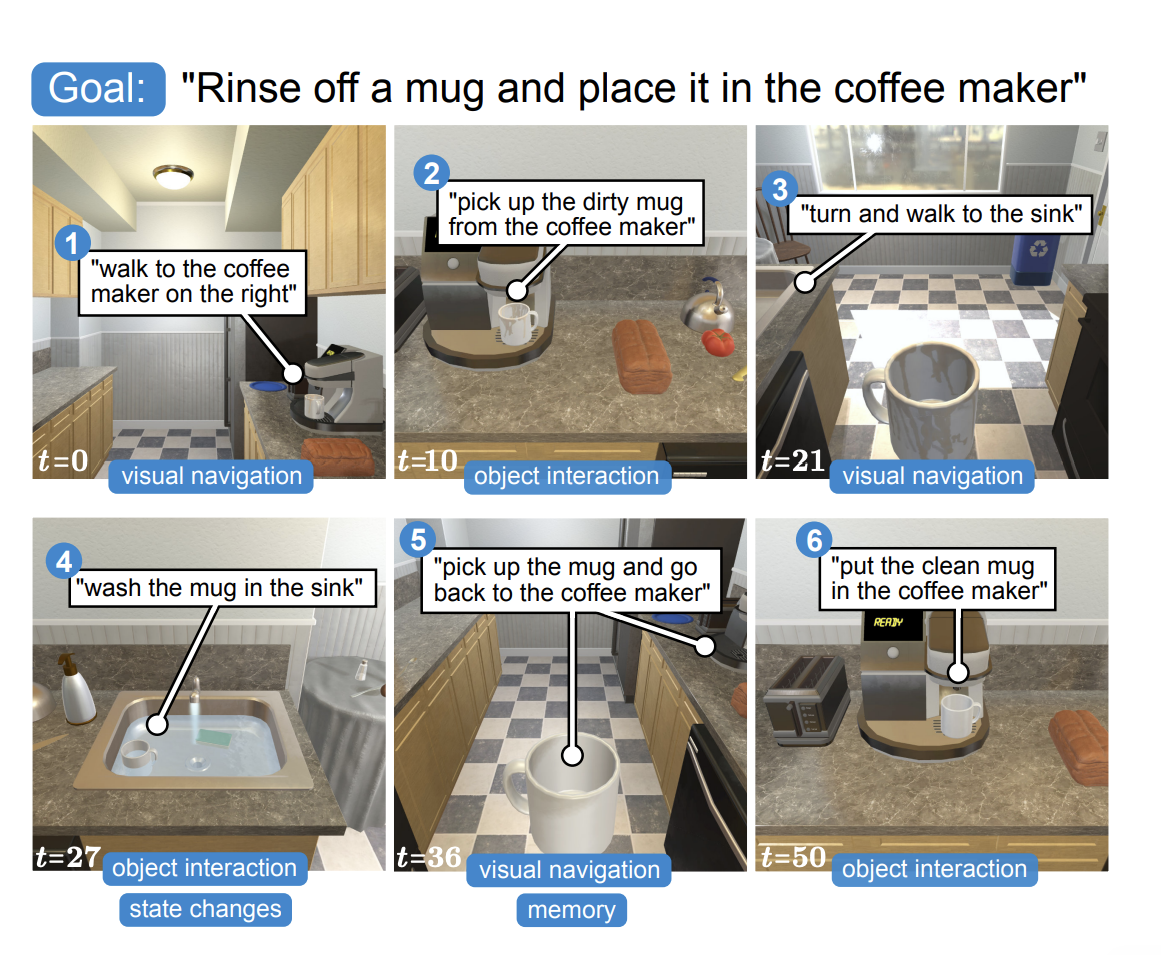
Kunal Pratap Singh*, Suvaansh Bhambri*, Byeonghwi Kim*, Roozbeh Mottaghi, Jonghyun Choi ICCV, 2021 Paper | Code We factorize the policy and perception into separate streams to train effective instruction following agents on the ALFRED benchmark. Also presented at Embodied Vision, Actions and Language Workshop, ECCV 2020 and Embodied-AI workshop, CVPR 2021. |
|
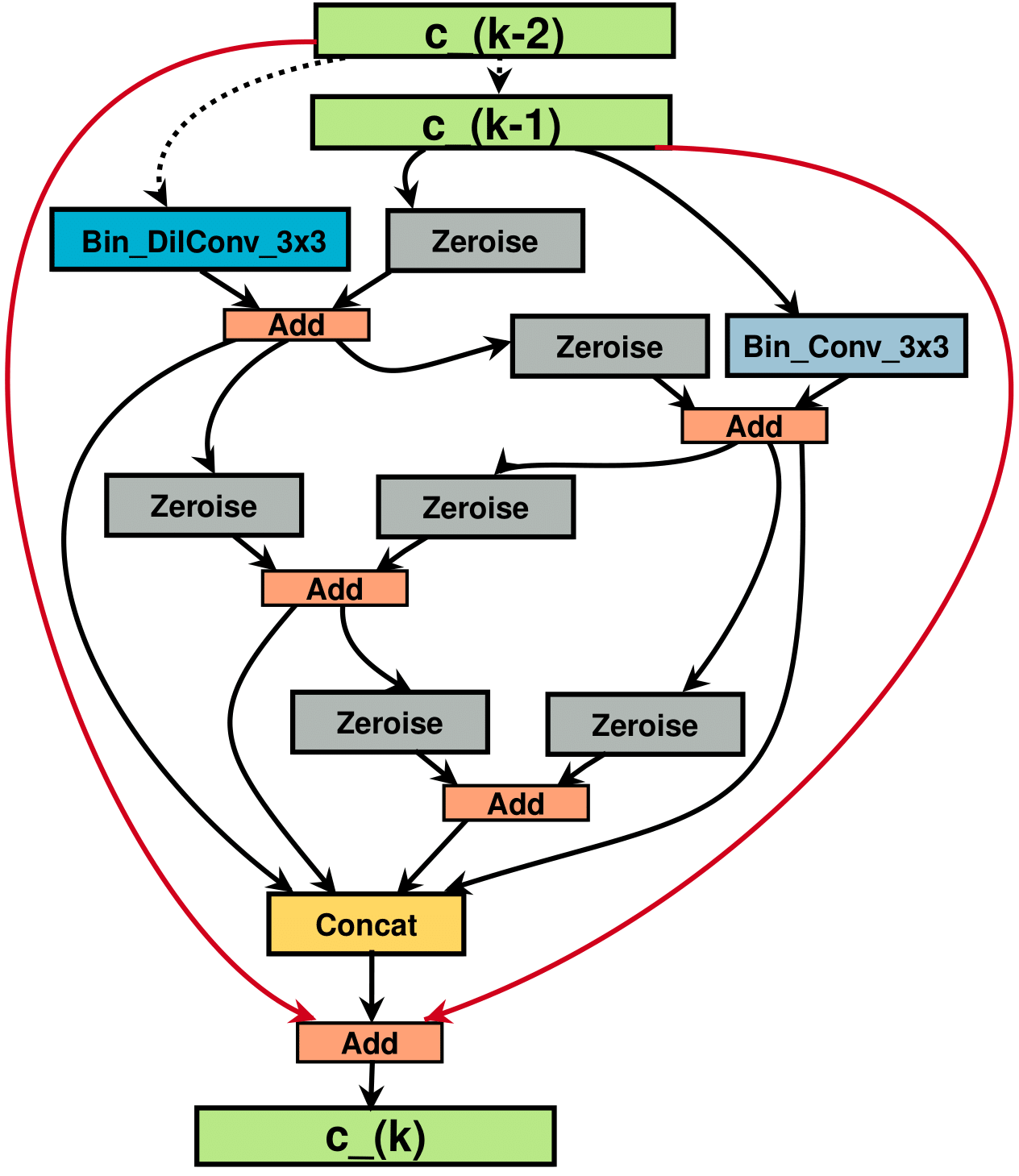
Kunal Pratap Singh*, Dahyun Kim*, Jonghyun Choi ECCV, 2020 Paper | Code We develop the first architecture search method for binary neural networks. We propose a new search space and cell design, and discover architectures that outperform floating point backbones. |
|
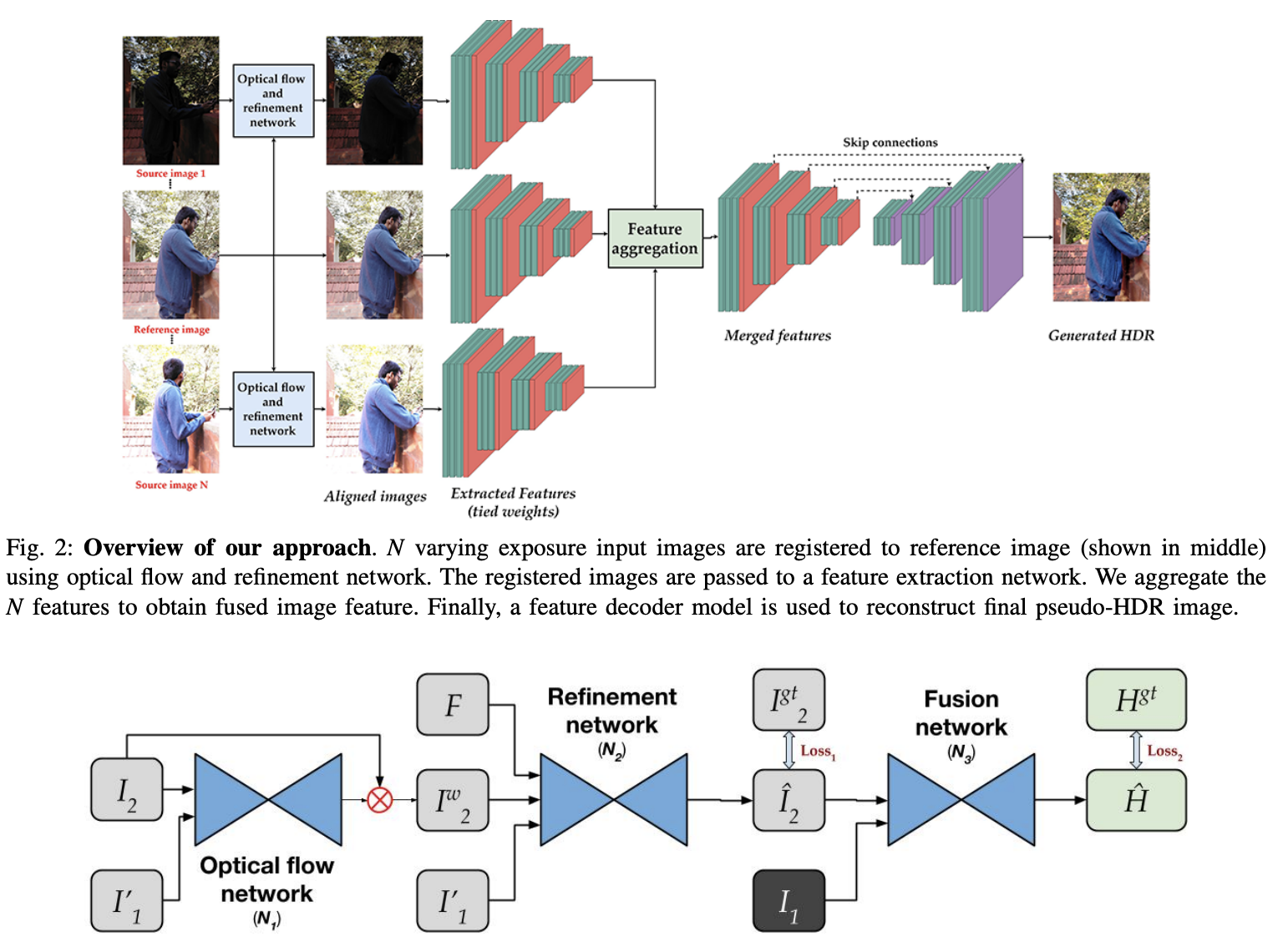
K. Ram Prabhakar*, Rajat Arora*, Adhitya Swaminathan, Kunal Pratap Singh, R. Venkatesh Babu ICCP, 2019 Paper | Code Proposed a flexible Deep Learning based approach for exposure fusion and HDR Imaging from arbitrary number of exposure bracketed shots. |
|
|